| DEM with Stereo IKONOS: A Reality if...
By Thierry Toutin and Dr. Philip Cheng Introduction
A digital elevation model (DEM), as a representation of the Earth's relief, is now one of the most important data structures used for geospatial analysis and modeling. The digital format of a DEM has made it easier to derive additional information for various applications, thereby causing elevation modeling to become an important part of international research and development programs as related to geo-spatial data. In fact cartographers, engineers, geologists, hydrologists, and other geo-scientists largely employ three-dimensional (3D) information to better understand the Earth's surface. Unfortunately, DEMs with usable details are generally unavailable for much of the Earth's surface and, when available at all, frequently lack sufficient accuracy.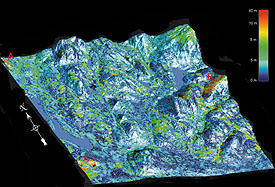 Figure 5: Perspective view of the DEM error (topographic DEM minus IKONOS DEM) draped over the IKONOS DEM. Note the errors larger than 10 meters (in red) located in (A) sand/gravel pits (NW and SW and (B) NW slopes of mountains.
IKONOS, the commercial satellite with the highest publicly available resolution, was successfully launched in September 1999. Since the satellite's sensors can generate one-meter panchromatic and four-meter multiband images, with off-nadir viewing of up to 60 degrees in any azimuth, stereo capabilities are one of its strongest attributes. General users can apply photogrammetric techniques to IKONOS stereo images using softcopy stereo workstations so as to extract planimetric features, elevation data that may include DEMs, or both. The high-spatial-resolution stereo imagery sold by Space Imaging to government agencies has nearly unlimited use in applications such as national mapping, environmental monitoring, natural disaster assessment, and watershed management. Stereo data can also be used to create 3D models to help city administrators plan, develop and manage utilities - including gas, water and power transmission or distribution - and telecommunications networks. Stereo-image Acquisition on IKONOS
The three main attributes of IKONOS stereoscopic imagery are 360-degree pointing capability, a base-to-height (B/H) ratio of 0.6 and greater - similar in scope to aerial photography - and the highest resolution available to civilian remote sensing and mapping communities.
The 360-degree pointing capability enables the generation of across-track stereoscopy from two different orbits - such as with SPOT-HRV - as well as along-track stereoscopy from the same orbit - such as with JERS-1's Optical Sensor. The across-track solution has been used most often since 1980; however the along-track solution as applied to space-frame cameras has seen renewed popularity in the past 10 years. In fact, same-date along-track stereo-data acquisition has a strong advantage over multi-date across-track stereo-data acquisition because it reduces radiometric image variations (temporal changes, sun illumination, etc.), thus increasing the correlation success rate in any image-matching process.
This along-track solution to acquire stereo data is generally chosen by Space Imaging not only for scientific, but also for operational reasons. Are these stereo data now available? The answer is "yes," but only for governmental administrations and as long as they are not used for commercial purposes (marketing, selling and distributing). A strict customer-licensing agreement governs the usage of the stereo images and their derivative products.
Since Space Imaging does not provide raw data along with their ancillary data - which is the preferred embodiment for the photogrammetrist community - IKONOS stereo images are distributed in a quasi-epipolar geometry reference where only the elevation parallax in the scanner direction remains. For along-track stereoscopy with the IKONOS orbit, it corresponds roughly to a north-south track, with a few degrees in azimuth depending upon the across-track component of the total collection angle. Five different product levels are available for IKONOS data, but only one similar to the GEO product can be ordered for stereo data. They are distributed in an eight- or 11-bit GeoTiff format with an ASCII metadata file (including order parameters, source image and products file descriptions). However, detailed orbital information is not included. Since archive orders are generally not available for stereo images, newly collected data are typically delivered in two or more weeks, depending upon order size, weather, and required accuracy.
Largely extrapolated on results from similar systems mounted on aircraft platforms or from scanned aerial photos, IKONOS stereo images have the potential for creating DEMs with about two-meter accuracy for use in national mapping. This accuracy can be consistently achieved if the DEM is manually edited with 3D capability, mainly in urban areas due to the presence of buildings. Work remains to be done to evaluate the possibility for automating some processing steps, and for using such existing cartographic data as breaklines, hydrographic features, and buildings. Are these accuracy expectations too high in an operational environment? Processing of IKONOS Stereo Data
IKONOS stereo data can be processed either by the rational polynomial method or by the rigorous method. The purpose of this article is to look at the applicability of these two methods to IKONOS stereo data for creating a DEM that uses an automatic image matching process, and to present elevation accuracy results when compared to ground truth.
The rational polynomial method is a very simple one, involving a ratio of polynomial transformations that takes into consideration ground elevation. This method does not require satellite and sensor information, nor does it model the physical reality of the image geometry. It is thus sensitive to input errors. As a first approach for this method, many ground control points (GCPs) are required to resolve the second- or third-order polynomial unknowns (20 or 40 for second- or third-order, respectively). The rational polynomial method corrects locally at the GCPs; however, distortions between the GCPs are not entirely eliminated, resulting in this method being useful only for small areas with gentle terrain. This approach can only be applied to creating ortho-images with existing DEMs, rather than creating DEM from stereo images. The rational polynomial method can also be used in a second approach to approximate an already solved rigorous model. This approach has been proven adequate for aerial photography or for small-area satellite images. When the area that has been imaged is large, the image itself has to be subdivided, and separate rational function models are required for each sub-image. Vendors such as Space Imaging, and government agencies such as the National Imagery and Mapping Agency, are the main users of this piecewise approach. Having knowledge as to all the rational function parameters for each sub-image, this piecewise approach can be used for generating DEMs without GCP, but is considered useless when a more precise rigorous parametric method (such as is described below) is available. Furthermore, these DEM results are not usually accurate enough for many cartographic applications.
The rigorous method of stereo data processing uses a parametric model that reflects the physical reality of the complete viewing geometry. It corrects distortions due to the platform, sensor, Earth, and deformations as a result of cartographic projection. When compared to the rational polynomial method with piecewise approach, the rigorous method produces results of the highest accuracy with relatively few GCPs necessary for an entire image.
Even though detailed sensor information for the IKONOS satellite has not been released, the first author of this article has successfully developed a rigorous IKONOS model using basic information that is available from metadata and image files. For example, approximate sensor viewing angles can be computed using the nominal collection elevation and azimuth in addition to the nominal ground resolution. The CCRS model - based upon principles related to orbitography, photogrammetry, geodesy and cartography - was adapted for the specificity of IKONOS images. For stereo images, both colinearity and coplanarity conditions are used to simultaneously compute the interior and exterior orientation parameters in a least-square, bundle-adjustment process.
The CCRS model has been successfully applied with only a few GCPs (three to six) to VIR single or stereo data (Landsat 5 & 7, SPOT, IRS, ASTER, KOMPSAT and IKONOS), as well as SAR data (ERS, JERS, SIR-C and RADARSAT). Based upon good quality GCPs, the accuracy of this model was proven to be within one-third of a pixel for medium-resolution VIR images, and one resolution cell for SAR images. Previous results using this model have shown accuracy from between two to four meters for panchromatic and multi-band IKONOS images on different study sites (urban, semi-rural, rural, rolling and mountainous relief) depending upon the accuracy of the DEM and GCPs. Stereo Experiment
To test the stereo capability of the rigorous method, we ordered an IKONOS stereo product in autumn 2000 for a semi-urban area north of Qubec City, Quebec, Canada (N 47¼, W 71¼ 30'). This study area has an elevation range of from 150 meters to 500 meters. Unfortunately, the along-track stereo-data was acquired on January 3, 2001, with a sun illumination angle as low as 19 degrees, generating long shadows due to trees. The images, with a resolution of a little less than one meter and a stereo-intersection angle of 54 degrees (B/H=1.0), were delivered within thirty days of acquisition. Each image of the stereo pair was delivered in two tiles, and stitching was necessary to regenerate the quasi-epipolar image geometry. The metadata file was processed to compute the satellite and sensor parameters needed for the rigorous model.
The cartographic data - six one-meter-pixel ortho-photos, a five-meter accurate DEM, and digital vector lines - was provided by the Ministre des Ressources Naturelles du Qubec. While only six GCPs are enough for the rigorous method, 55 GCPs were collected in stereoscopy from the stereo-images for the different tests. Their map coordinates (x, y, z) were obtained from six ortho-photos plus the DEM. A mean positioning error of five meters in the x direction was found between the different ortho-photos; this error is due mainly to a five-meter DEM error during the ortho-photo generation process.
To test IKONOS stereo capability for DEM generation, PCI OrthoEngine Satellite Edition V8.0 software (a product that supports the two aforementioned correction methods) was used. This software also supports the reading of different satellite data, GCP and tie points collection, geometric modeling, ortho-rectification and mosaicking, stereo-model computation, image matching, and DEM generation with either manual or automatic editing.
The second author of this article developed the automatic DEM generation software. This software can be used to generate DEMs from aerial photos and such satellite stereoscopic sensors as IKONOS, IRS, SPOT, KOMPSAT and RADARSAT. After the rigorous models (colinearity and coplanarity equations) were computed simultaneously for the stereo-images using a minimum of six GCPs, an automated image-matching procedure was used by comparing the respective grey values of the images. This procedure utilized a hierarchical sub-pixel normalized cross-correlation matching method to find the corresponding pixels in the left and right quasi-epipolar images. The difference in location between the images gives the disparity or parallax arising from the terrain relief, which is then converted to x/y/z map coordinates using a 3D space-intersection solution. Results and Analysis
Table 1 shows the root mean square (RMS) and maximum residuals/errors for three different tests, performed on stereo IKONOS images to evaluate the robustness of the rigorous model:
1. All 55 GCPs are used to compute the stereo-model
2. All 55 GCPs are used to compute the stereo-model with an erroneous point (20-meter error in the y direction)
3. Only 12 GCPs are used to compute the stereo-model, and 33 independent checkpoints (ICPs) are used to check the stereo-model.
Table 1: Comparison of residual results (in meters) using the rigorous method over GCPs/ICPs for the three tests.
These three tests show that the five-meter error in the GCP x-coordinate, as previously mentioned, did not propagate through the rigorous model but is reflected in all x-residuals, and in the RMS x-error of Test 3. Test 1 shows that the maximum residual is around two times the RMS residuals, demonstrating stability over the entire stereo-images. Test 2 shows that the y-residual of the erroneous point is three times higher than the RMS y-residual. Consequently, the systematic error is immediately detected with its approximate value and direction. Since part of the seven-meter x-error on ICPs (Test 3) includes the five-meter random error of the ground x-coordinate, Test 3 shows that 12 GCPs are enough to achieve a stereo-model accuracy of around three to four meters, both horizontally and vertically.
These three tests demonstrate that the rigorous method is both stable and robust without generating local errors, and it filters random or systematic errors. The input GCP error does not propagate through the rigorous model, but rather is reflected in the residual. Since errors always occur in operational environments, it is thus important to detect all potential errors in the GCPs before starting the extraction of the DEM.
The most interesting result of this test is the comparison of the stereo-extracted DEM using the automatic matching and editing process. The generated DEM was compared with the topographic DEM (five-meter grid spacing and five-meter accuracy) using 4.4 million points in the statistical evaluation. Even though the images were acquired in January where snow cover, frozen lakes and tree shadows were mitigating factors, mismatched areas over the entire stereo-image field account for only five percent of the total. Of these, 2.5 percent represented lakes, while the remaining 2.5 percent were mainly points located along the northwest slopes of mountains affected by sun shadow (elevation angle of 19 degrees and azimuth of 166 degrees). These first mismatched results confirm that multi-scale matching performed well with one-meter high-spatial resolution data in semi-rural areas.
As seen in the first line of Table 2, the 4.9-meter standard deviation (STD) obtained with a 74 percent level of confidence is a fair result. Not only did this deviation include the five-meter error of the topographically checked DEM, but it also included canopy height. Since there are so many fine details in the stereo-extracted DEM, its accuracy evaluation must be realized for different classes of land cover. Six such classes are used in this area: dense forest, sparse forest, bare soils, sand/gravel pits, lakes, and cities. These results are also presented in Table 2. The best results (around 3.5-meter STD) are obtained for four classes of no- or low-elevation cover (bare soils, lakes, sparse forest, and urban/residential areas). While the houses in residential and urban areas do not greatly affect these statistics, the canopy height of the dense boreal forest does generate results that are slightly worse, i.e., a 5.2-meter STD and a larger negative bias. Finally, the largest errors (11-meter STD and minus-50-meter/37-meter min./max.) are in the sand/gravel pits, located to the northwest and southwest of the images, where elevations changed over time. Furthermore, errors larger than 10 meters are located in the northwest slopes of mountains, where shadows due to the sun elevation angle and azimuth of 19 degrees and 166 degrees are present, respectively. These specific errors are representative of the study site and the stereo images, but are not representative of the general IKONOS stereo potential for DEM generation in semi-rural areas.
Table 2: Statistical DEM results for the entire study site, as a function of the land cover. Conclusions
One major drawback to the efficient and appropriate use of IKONOS stereo data is the difficulty for users to geometrically process and extract 3D information. Whatever its recent popularity in some mapping communities, the rational polynomial model for geometric correction cannot provide DEM accuracy that users typically expect from high-spatial-resolution data. Conversely, the CCRS-developed rigorous model available in the PCI operational environment can be used for the accurate processing of stereo images, and for extracting 3D information. Given accurate ground data, users may therefore produce their own DEMs, each with its own characteristics (projection, datum, grid spacing), and obtain an accuracy of from between three to five meters, depending upon land cover. This accuracy can be consistently achieved if the automatic DEM is manually edited with performing 3D capability.
As a result, this CCRS-PCI technology should promote the acquisition and the use of stereo data in many applications, since a DEM is one of the most important data structures used in geospatial analysis and modeling. Since many cartographic features and fine topographic details are present in the stereo IKONOS DEM, the DEM is actually a digital surface model (DSM). It can thus be used as a complementary tool in ortho-imagery for automatically classifying planimetric features (roads, power lines), urban areas (streets and houses), and for extracting house or canopy elevation. DEMs from IKONOS stereo data thus becomes a reality if the data becomes available to end-users of photogrammetry, mapping, and remote sensing communities.
Work remains to be done in order to evaluate the possibility of integrating existing cartographic data - buildings in urban areas, and hydrographic features or canopy heights in rural areas - in post-processing, as well as extracting cartographic features from the DEM. Evaluation is still ongoing at CCRS using a more precise topographic DSM (around one to two meters) including canopy and building heights. Other IKONOS stereo images over different topographic terrain, including North American cities and high relief, are also being evaluated. About the Authors:
Dr. Thierry Toutin is a principal research scientist at the Canada Centre for Remote Sensing, Natural Resources Canada, Ottawa, Ontario, Canada. His e-mail address is [email protected]. Dr. Philip Cheng is a senior scientist at PCI Enterprises, Richmond Hill, Ontario, Canada. His e-mail address is [email protected]. Back |

